Overview | Features | Installation | Running the MQTT client | Configuration | Pan-Hardware | Home Assistant Integration
Picam2ctrl is a MQTT client based on new Picamera2 API with Home Assistant discovery support.
General Restriction
Since Picamera2 is currently only available as a beta release picam2ctrl can break with newer Picamera2 releases.
More details about the new libcamera-based Python-API for Raspberry Pi camera you can find here.
MQTT client to control your Raspberry Pi Camera with Home Assistant
- actual 10 different MQTT client entities
- taking snapshot pictures
- capturing MP4 videos incl. audio
- simple HTTP MJPEG streaming server
- UDP video streaming
- motion/occupancy detection by camera
- timestamp support
- time elapse video support
- PAN / TILT camera support with 5V Stepper Motor (28BYJ-48) and ULN2003 driver board (optinal)
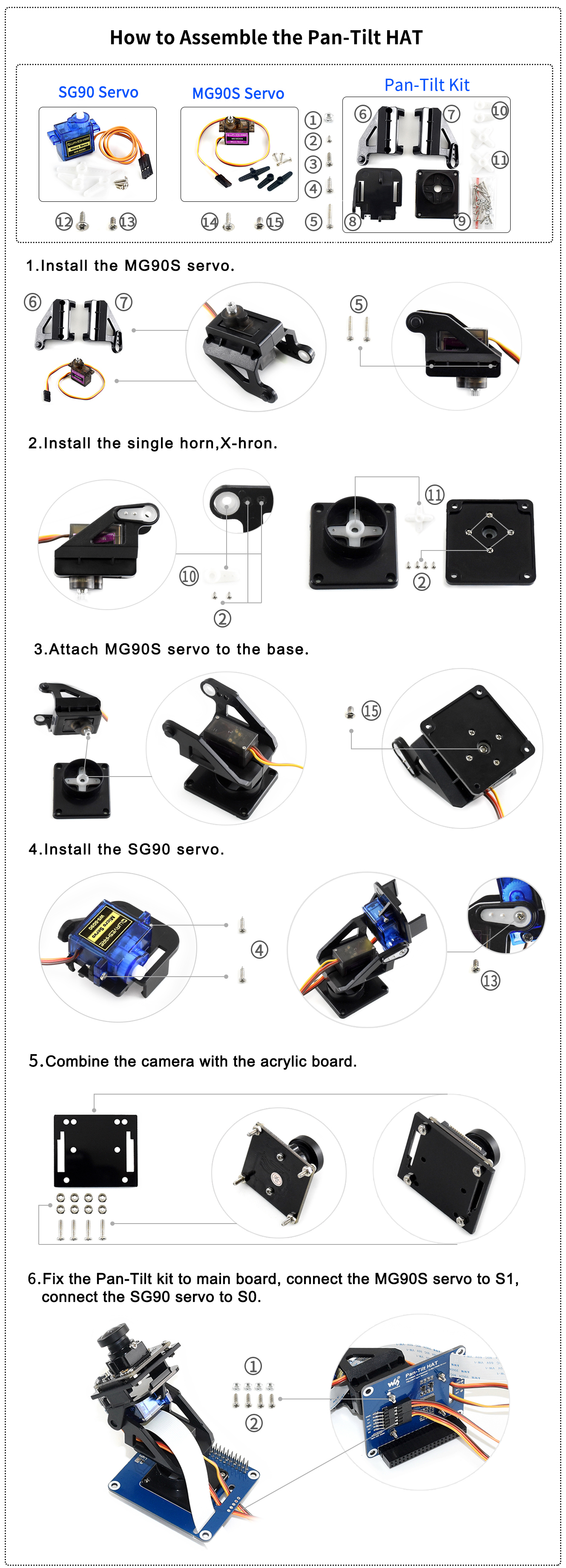
- PAN-TILT Hat by Waveshare integrated incl. lighsensor
- support of secure copy latest picture- / video-files to SSH server
Raspberry Pi OS bullseye version is required and camera legacy mode must be disabled in raspi-config. On headless Raspberry Pi OS lite you have to update from libcamera-apps-lite to full version libcamera-apps. No gui but OpenCV python bindings and paho-mqtt package are required:
sudo apt-get install -y --no-install-recommends libcamera-apps python3-picamera2 python3-opencv python3-paho-mqtt python3-smbus ffmpeg git
finally clone the picam2ctrl repository:
git clone https://github.com/irimitenkan/picam2ctrl.git
For 1st setup the calibration of the servos is required to avoid a damage when the servos are assembled, i.e. that must be done BEFORE the Pan-Tilt Hat is assembled completly. After that the servomotors are set to 0° degrees. Keep in mind you still have to consider the angles for assignment of the CAM direction when you assemble the hat.
According to Waweshare's documentation there is a test program for servo adjustment but it requires WiringPi which has been removed from Bullseye's repro. WiringPi package is still available at github but we can use here a python script instead. It is available at this picam2ctrl repro.
Hence:
-
enable I2C in raspi-config (Interface options -> I2C -> enable)
-
python smbus is required:
sudo apt install python3-smbus -
only connect Pan & Tilt servos to hat
-
connect hat with Raspberry Pi
-
execute servoTest
python pantilt/waveshare/servoTest.py -
proceed with Pan-Tilt Hat assembling see Waveshare's guideline
-
finally enable Pan-Tilt Hat in config.json if not already done
"PanTilt":{ "active":"WAVESHARE_HAT",
{kind=link}
For Picamera2 with GUI support , for non-headless Raspberry see Picamera2 installation
Example config.json
{
"LogLevel":"INFO",
"storepath": "/home/pi/picam2",
"camera": {
"index":0,
"hflip":1,
"vflip":1,
"sensitivity": 10,
"tuning":"/usr/share/libcamera/ipa/raspberrypi/imx708.json"
},
"timestamp": {
"enabled":true,
"format": "%A %d.%b %Y - %X",
"color" : "[255, 255, 0]",
"origin" : "[0, 45]",
"font" : "FONT_HERSHEY_TRIPLEX",
"fscale" : 2,
"thickness" : 2
},
"image": {
"prefix":"snap",
"fmt": "jpg",
"size": "[4056, 3040]"
},
"video": {
"prefix": "videosnap",
"bitrate": 1000000,
"size" : "[ 1920, 1080]",
"quality" : "HIGH",
"audio":true,
"streaming": {
"udp_addr": "<DESTINATION-IP-ADDRESS>",
"udp_port": 10001,
"http_port": 8010,
"http_index":"www/index.html"
}
},
"MQTTBroker":{
"host":"<ADDRESS OF BROKER>",
"port": 8883,
"username":"<USERNAME>",
"password":"<SECRET>",
"servercafile":"",
"clientkeyfile":"",
"clientcertfile":""
},
"SSHClient":{
"enabled":true,
"server": "<SSH SERVER ADDRESS>",
"user" : "<SSH USERNAME>",
"dest_path" : "/opt/homeassistant/config/tmp"
},
"PanTilt":{
"active":"WAVESHARE_HAT",
"speed":"SLOW",
"Pan":{
"angle_max":80,
"angle_min":-80,
"flip":true
},
"Tilt":{
"angle_low":-26,
"angle_high":60,
"flip":true
},
"None":{
"//":"PanTilt is disabled"
},
"ULN2003":{
"Pan_enabled":true,
"Tilt_enabled":true,
"check":true,
"Pan_GPIO_PinA": 27,
"Pan_GPIO_PinB": 22,
"Pan_GPIO_PinC": 23,
"Pan_GPIO_PinD": 24,
"Tilt_GPIO_PinA": 13,
"Tilt_GPIO_PinB": 15,
"Tilt_GPIO_PinC": 16,
"Tilt_GPIO_PinD": 18
},
"WAVESHARE_HAT":{
"sensorRefresh":60
}
}
}
- "index":0 - the camera idx of connected camera
- "hflip", vflip: 0/1 - to rotate camera output
- "sensitivity": 10 - used for motion detection,for manual calibration, set LogLevel to "DEBUG" and check output during detection.
- "tuning": "path to file" - special tuning e.g. for noir camera
- "format" = "code string", see documention of strftime options
- "font" : allowed 'HERSHEY' string values see module picam2.FONTS resp. here
- "quality" : "HIGH" - allowed values: VERY_LOW, LOW, MEDIUM, HIGH or VERY_HIGH
- "audio":true - enable/disable audio for mp4 file resp UDP streaming (http actually not supported).
resp. SCP support to be used to copy latest snapshot picture / mp4 video to a SSH server (e.g. your Home Assistant host) but setup up public key authentication is required:
-
generate SSH Key with ssh-keygen e.g.
ssh-keygen -t rsa -b 4096 -
copy the public key to your desired server with
-
ssh-copy-id -i ~/.ssh/id_rsa.pub user@host -
verify passwordless login:
ssh user@host -
finally check user@host has write access to configured destination path e.g.: "dest_path" : "/opt/homeassistant/config/tmp"
- "check" : when 'true' the LEDs on ULN2003 driver board will flash during startup (A->B->C->D, if GPIO PINS are connected correctly), disabled with 'false'
- 'speed' : PAN speed, allowed values: VERY_SLOW, SLOW, MEDIUM, FAST, VERY_FAST
- 'angle_max : maxium absolute angle to pan camera to left resp. right side
- 'GPIO_PinA (B, C, D)' : GPIO Pin A (B, C, D) of ULN2003 driver board wiring assigment, see check option for verification. More details see PAN-HW chapter
- 'sensorRefresh': refresh rate in [t] to update the most recent illuminance state of light sensor
-
to start from terminal
cd picam2ctrl python3 picam2ctrl.py
with option: -c FILE, --cfg=FILE set config file default: ./config.json
-
to stop it & started from terminal
enter CTRL-C -
to enable at startup and start service:
loginctl enable-linger systemctl --user enable --now ~/picam2ctrl/picam2ctrl.service -
to disable running service at startup and stop it:
systemctl --user disable --now picam2ctrl -
to stop the service again
systemctl --user stop picam2ctrl -
to start the service
systemctl --user start picam2ctrl -
check the status of the service
systemctl --user status picam2ctrl -
check the picam2ctrl specific service logs
journalctl --user-unit picam2ctrl
The PAN camera can be realized with a step-motor which can be controlled with 4 GPIO ports of your Raspberry Pi.
You need to buy a 5V step motor 28BYJ-48 with ULN2003 driver board.
Howto setup the hardware wiring you can find e.g.here or here.
Finally we need a construction to pan the connected Raspberry Pi Camera with above mentioned step-motor. As solution a Raspberry Pi housing with camera integration support is recommended: we pan the complete Raspberry Pi case.
My 1st prototype is using the Raspberry Pi 3 case with a wide angle camera. Here is an image of the PAN camera prototype and some construction details Mounting_Prototype_1.jpg & Mounting_Prototype_2.jpg
{kind=link}
{kind=link}
{kind=link}
Full support of Waveshare's Pan-Tilt Hat, see some more details at Installation
All picam2ctrl entities will be detected by Home Assistant automatically by HASS discovery function via configured MQTT broker.
-
picam2ctrl.< HOSTNAME >.Record:
represents a state
- state runing when Image Snapshot / (Timelapse) Video or streaming is active
- state not running when no picam2 record function is active
-
picam2ctrl.< HOSTNAME >.Snapshot:
this is a switch to enable/disable the picture snapshot function.
- when [image.snapshots](# Configuration) is set to 0, picam2ctrl takes picture every [image.snapshots_t](# Configuration) seconds in an endless loop, since there is no switch off request
- when count is set to x>0, picam2ctrl takes x pictures every .. s and stops.
- when Motion is disabled picture(s) will be taken immediately
- when Motion is enabled, picture(s) will be taken only after motion detection
- when timestamp is enabled each picture has a time stamp as configured in json configuration
- when [SSHClient] is enabled the latest taken picture(s) will be copied via secure shell to configured path @SSH server
-
picam2ctrl.< HOSTNAME >.SnapshotCounter
this is a number box field:
- setup how many images will taken when Snapshot function was triggered
-
picam2ctrl.< HOSTNAME >.SnapshotTimer
this is a number box field:
- setup the time between two image snapshots when SnapshotCounter > 1
-
picam2ctrl.< HOSTNAME >.TimeLapse:
This is a switch to activate / deactive TimeLapse function for Video resp. Snapshotfunction
- when active and 'Video' is triggered: a mp4 video with "VidLapsSpeed" factor is created
- when active and 'Snapshot' is triggered and SnapshotCounter > 1 a mp4 video is created by concatenating the snapshot images Attention: ffmmeg and mkvmerge must be installed
-
picam2ctrl.< HOSTNAME >.VidLapseSpeed
This is a slider to to setup the timeeplased video speed:
- the time speed factor to create an mp4 video when 'TimeLapse' is active
-
picam2ctrl.< HOSTNAME >.Video:
This is a switch to enable/disable the video snapshot function.
- when count is set to x>0, picam2ctrl takes x pictures every .. s and stops.
- when Motion is disabled picture(s) will be taken immediately
- when Motion is enabled, picture(s) will be taken only after motion detection
- when timestamp is enabled each picture has a time stamp as configured in json configuration
- when audio is enabled & available mp4 video file incl. audio stream is created
- when SSHClient is enabled the latest taken video will be copied via secure shell to configured path @SSH server
-
picam2ctrl.< HOSTNAME >.HttpStream:
This is a switch to enable/disable a simple HTTP Server with MJPEG stream.
-
picam2ctrl.< HOSTNAME >.UdpStream:
This is a switch to enable/disable an UDP video stream.
-
picam2ctrl.< HOSTNAME >.Pan-Automation:
This is a switch to enable/disable to pan the camera in range from -angle_max to +angle_max automatically.
-
picam2ctrl.< HOSTNAME >.Pan:
This is a slider to pan the camera in range -angle_max to +angle_max manually.
-
picam2ctrl.< HOSTNAME >.Tilt:
This is a slider to tilt the camera in range -angle_max to +angle_max manually. It is only available with WAVESHARE_HAT or ULN2003 & tilt enabled.
-
picam2ctrl.< HOSTNAME >.MotionEnabled:
This is a switch to enable/disable the motion detection.
- a switch off request deactivates a running function, too
- when disabled the Motion binary switch is not available in HASS
-
picam2ctrl.< HOSTNAME >.Motion:
This is a binary switch . It becomes active for ~0.5s if
- MotionEnabled switch is active
- and one of the above mentioned functions (streaming, picture/video snapshot) is enabled
- and a motion has been detected by camera
Restrictions Only one switch resp. camera application (HTTPStream, UDPStream, video capturing to file or image snapshots ) can be enabled. Since one application is active, switching on requests for other applications are ignored.
-
picam2ctrl.< HOSTNAME >.Lightsensor:
This is a illumance sensor , which is only avaliable with Waveshare Pan-Tilt Hat
configuration.yaml examples for showing camera output in Home Assistant:
camera:
- platform: ffmpeg
name: picamera2
input: 'udp://@:10001'
camera:
- platform: local_file
name: picamera2
file_path: /config/tmp/latest/latest1.jpg
-
In Home Assistant go to
- add integration
- from the list, search and select “MJPEG IP Camera”
- in MJPEG-URL field enter
http://< YOUR_RASPI_ADDRESS >:< CONFIGURED_HTTP_PORT>/stream.mjpg