synth.synthesize() tries to assign out of bounds values #238
Comments
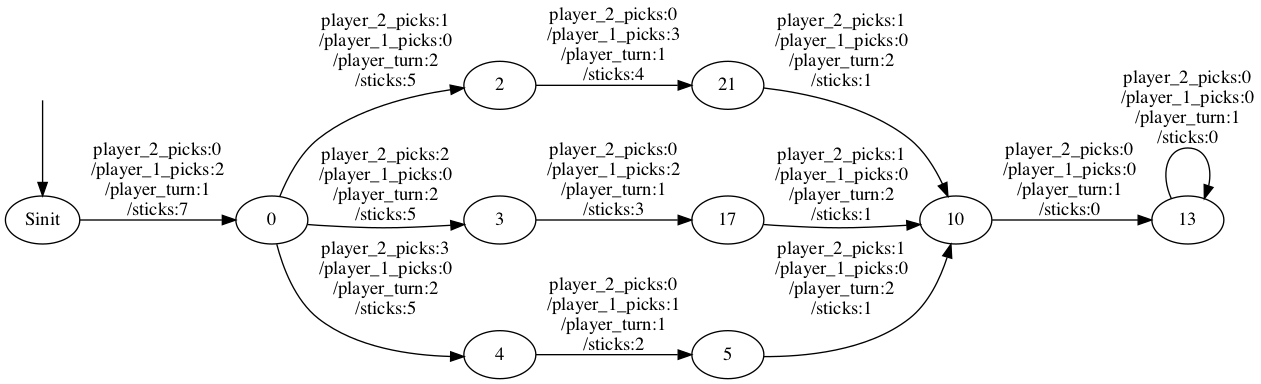
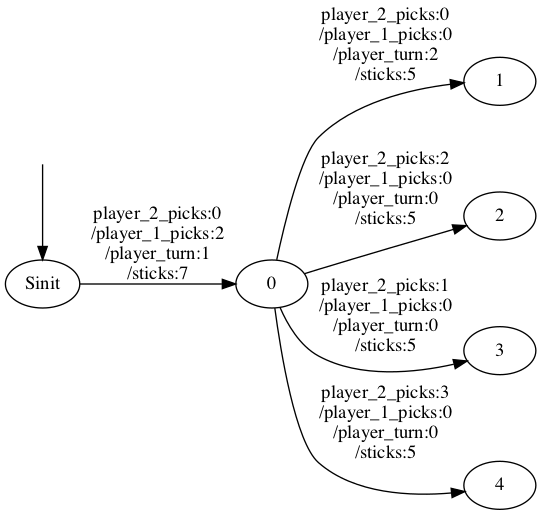
SummaryI could reproduce the error. A strategy for the first specification is synthesized by The error is raised because the specification formulas allow system transitions outside the range of values that is defined in the variable declaration (and type-checked by Automatically generating specification formulas according to variable declarations to avoid this would be implicit. Explicit is better than implicit [PEP 20]. A solution is to include suitable constraints in the specification formulas, as described below. Observations about the first specificationIn the first specification, the system's safety includes the constraint The first specification allows the system to transition to Specification modificationsKeeping the variable declaration "player_turn = 1 || player_turn = 2",
"player_turn' = 1 || player_turn' = 2",ensures that the system maintains the invariant
Strategy synthesized for the first specificationA strategy is synthesized by the interface
The transition to Line 1290 in ce54897 The reason for the error is that the Mealy machine attributes are type-checked using the variable declaration. The variable declaration describes the range Whenever a variable range is not of the form Automatically generating formulas from the variable declaration (The type checking using the class The strategy graph can be obtained by the following change to the module diff --git a/tulip/interfaces/omega.py b/tulip/interfaces/omega.py
index a4fe595..8a97d35 100644
--- a/tulip/interfaces/omega.py
+++ b/tulip/interfaces/omega.py
@@ -22,6 +22,7 @@ try:
from omega.games import gr1
from omega.symbolic import temporal as trl
from omega.games import enumeration as enum
+ from omega.symbolic import enumeration as sym_enum
except ImportError:
omega = None
import networkx as nx
@@ -60,6 +61,7 @@ def synthesize_enumerated_streett(spec):
gr1.make_streett_transducer(z, yij, xijk, aut)
t2 = time.time()
g = enum.action_to_steps(aut, 'env', 'impl', qinit=aut.qinit)
+ dump_graph_as_figure(g)
h = _strategy_to_state_annotated(g, aut)
del z, yij, xijk
t3 = time.time()
@@ -73,6 +75,13 @@ def synthesize_enumerated_streett(spec):
return h
+def dump_graph_as_figure(g):
+ """Create a PDF file showing the graph `g`."""
+ h, _ = sym_enum._format_nx(g)
+ pd = nx.drawing.nx_pydot.to_pydot(h)
+ pd.write_png('game_states.png')
+
+
def is_circular(spec):
"""Return `True` if trivial winning set non-empty.Details about edge attribute type checking for
|

|
Thank you for your very swift and detailed response. I tried to find a workaround by constraining the variable in the system safety specification, but I did not realize that I needed the primed variable as well. Thank you for pointing that out. It helps a lot. I would argue that I have explicitly constrained the variable domain to (1, 2), and the implicit part is encapsulated and happening far away in It seems like I run into the same problem also when trying to do synthesis with finite state abstractions. I use import tulip as tlp
import tulip.hybrid
import tulip.abstract
import tulip.spec
import tulip.synth
import polytope as poly
import numpy as np
# Continuous state space
cont_state_space = poly.box2poly([[0., 100.], [0., 20.]])
# System dynamics (continuous state, discrete time): simple integrator
h = 1.0
A = np.array([[1.0, h], [0., 1.0]])
B = np.array([[h**2/2.0], [h]])
E = None
# Available control, possible disturbances
U = poly.box2poly(np.array([[-5., 5.]]))
W = None
# Construct the LTI system describing the dynamics
sys_dyn = tlp.hybrid.LtiSysDyn(A, B, E, None, U, W, cont_state_space)
print(sys_dyn)
# Define atomic propositions for relevant regions of state space
cont_props = dict()
cont_props['target'] = poly.box2poly([[99., 100.], [0., 1.]])
cont_props['init'] = poly.box2poly([[0., 1.], [0., 20.]])
# Compute the proposition preserving partition of the continuous state space
cont_partition = tlp.abstract.prop2part(cont_state_space, cont_props)
print(cont_partition)
disc_dynamics = tlp.abstract.discretize(
cont_partition, sys_dyn,
closed_loop=False, conservative=True,
N=5, min_cell_volume=50, plotit=False
)
# disc_dynamics.plot()
print(disc_dynamics)
env_vars = {}
env_init = {}
env_safe = {}
env_prog = {}
sys_vars = {}
sys_init = {
'init',
}
sys_safe = {
}
sys_prog = {
'target',
}
spec = tlp.spec.GRSpec(env_vars=env_vars, sys_vars=sys_vars,
env_init=env_init, sys_init=sys_init,
env_safety=env_safe, sys_safety=sys_safe,
env_prog=env_prog, sys_prog=sys_prog)
spec.qinit = '\E \A'
ctrl = tlp.synth.synthesize(spec, sys=disc_dynamics.ts, ignore_sys_init=True) |
|
A way to avoid the error without mentioning the internal variable disc_dynamics.ts.states.initial.add_from(disc_dynamics.ts.states)
ctrl = tlp.synth.synthesize(
spec, sys=disc_dynamics.ts, ignore_sys_init=False)The resulting specification is unrealizable. |
|
Great! Thank you very much! Yeah, the unrealizability of the last example is the next problem. But that is definitely not caused by TuLiP :) I think I have some hours of work ahead of me :D |
|
I've recently experienced the same problem so maybe keeping this open is better. I would also expect that defining the range of a variable should be enough in order to constrain the valuations of these variables during synthesis. |
When I try to synthesize a strategy with a variable defined as
"player_turn": (1,2), I get an exception from synth.synthesize() stating:If I change to
"player_turn": (0,3), I do not get that exception, but I also do not get a strategy.If the specification is changed such that the variable range is shifted to start at zero, I do not get an exception, and I also get the expected correct strategy as a result. (The definition of the variable is changed to
"player_turn": (0,1)and all specifications are modified accordingly.)This behavior is a bit unexpected. Bounds should probably be treated the same way regardless of the actual values. However, I cannot tell for sure whether this is an error in TuLiP/omega/dd, or in my understanding of the same.
I am on commit ce54897 of tulip-control, omega version 0.3.1, and dd version 0.5.5.
omega warns that I am using autoref
During debugging I found that
"player_turn": (1,2)is represented by two bits in the BDDs, while"player_turn": (0,1)is represented by one bit. That feels reasonable, but it makes me think that maybe the handling of bounds in the BDDs does not work correctly. I am too unfamiliar with the code base to be able to debug any further, though.Code to reproduce
The code that does not work:
The code that does work:
The text was updated successfully, but these errors were encountered: